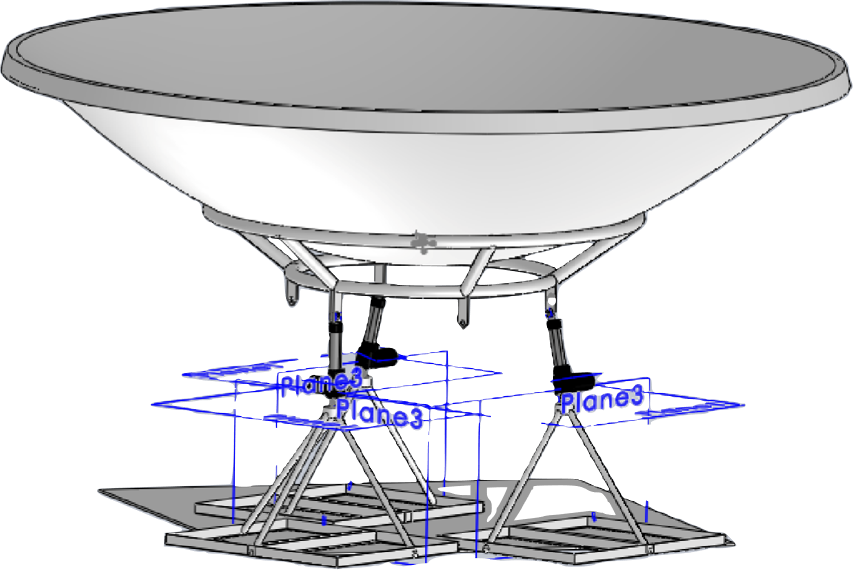
3RPS Parallel Manipulator in Celestial Tracking Mode
A high-resolution render of the 3RPS parallel manipulator configured to track celestial objects with precise angular positioning.
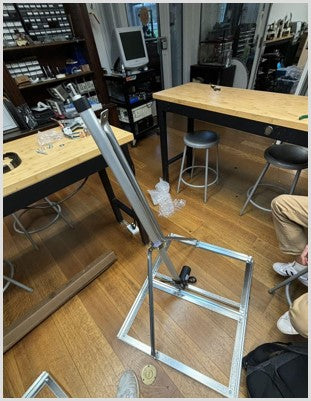
Physical Prototype of Celestial Tracking Manipulator
Real-time assembly of the 3RPS parallel manipulator in a laboratory environment.